
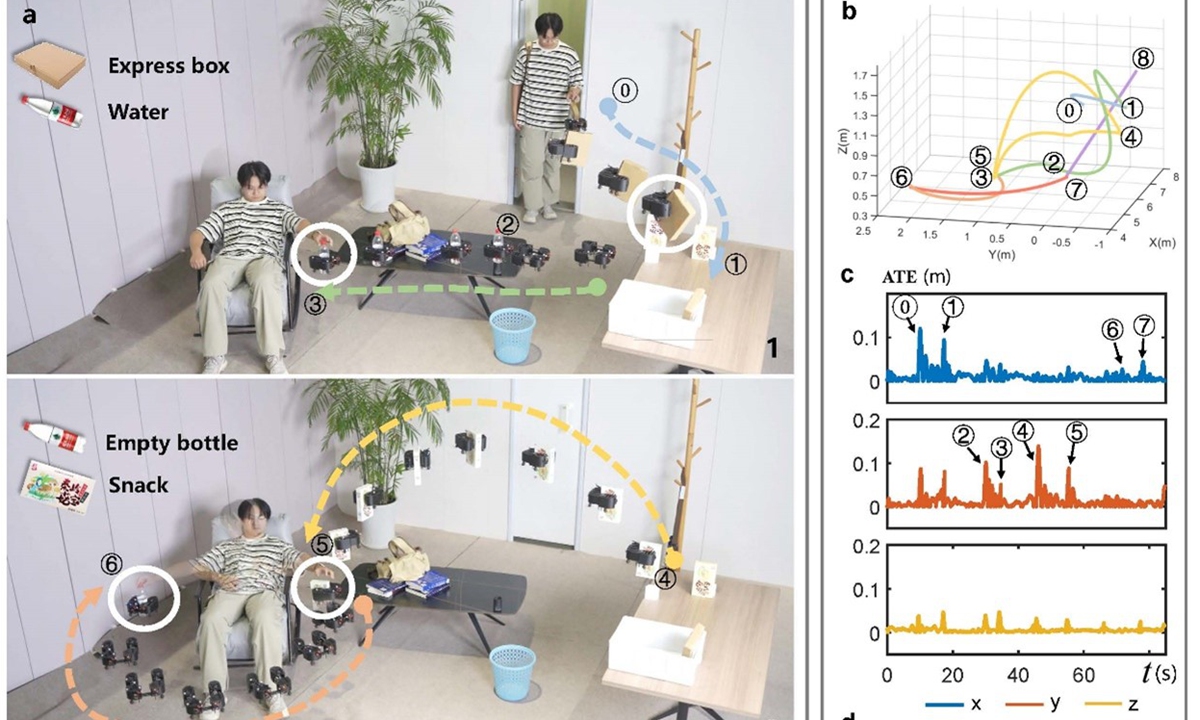
Dans un environnement domestique simulé, HI-ARM effectue successivement des actions telles que récupérer une livraison, remettre de l'eau, récupérer une bouteille vide et accrocher un cintre, le tout sans intervention humaine. Photo : Université du Zhejiang
Inspirée par les oiseaux qui peuvent voler avec leurs ailes et se percher habilement avec leurs serres, une équipe de recherche de l'Université du Zhejiang a conçu le premier robot de manipulation volant en forme de main au monde, selon l'Université du Zhejiang mardi.
Cette réalisation a été publiée en ligne dans la revue internationale Nature Communications le 30 janvier.
Le robot, baptisé HI-ARM (Hand-like compact Aerial Robot for Manipulation), a abandonné l'ancienne structure du système de vol plus un bras de robot, mais a efficacement combiné les deux fonctions du robot. Le robot, capable de voler, présente un contour de préhension ouvert en forme de C qui imite le mouvement d'une paume, une structure de doigt à 5 degrés de liberté combinant des mécanismes d'extension et de torsion.
Le HI-ARM est capable de tenir une bouteille d'eau dans sa « paume » et de pincer délicatement un mouchoir du « bout des doigts », tout en ne pesant que 556 grammes, l'équivalent d'une bouteille d'eau.
Le robot peut s'adapter de manière adaptative aux surfaces sans connaissance préalable de la forme de l'objet, qu'il s'agisse d'une bouteille d'eau ordinaire, de blocs d'alphabet irréguliers ou d'un tissu doux. Au contact, il ajuste de manière coordonnée ses cinq degrés de liberté pour obtenir une préhension stable. L'erreur de distance est inférieure à 3 centimètres.
Dans un environnement domestique simulé, HI-ARM a successivement réalisé des actions telles que récupérer une boîte de livraison, remettre de l'eau, récupérer une bouteille vide et accrocher un cintre, le tout sans intervention humaine. Face à différents objets, le robot change de manière autonome ses modes de préhension : lorsqu'il saisit une boîte de livraison express de 75 grammes, il la pince doucement du bout des doigts ; lorsqu'il saisit une bouteille d'eau de 134 grammes, il l'enveloppe dans la paume de sa main
Le robot peut également se déformer et saisir en temps réel pendant le vol, un peu comme la réaction humaine instinctive consistant à tendre la main pour saisir quelque chose, ne nécessitant aucun calcul complexe mais capable de répondre à des interactions inattendues dans des environnements chaotiques, selon l'université.
Pour examiner son potentiel pratique, l'équipe de recherche a mené une série de tests dans des environnements extérieurs réels : HI-ARM s'est contracté et déformé pour passer à travers une étroite crevasse rocheuse de seulement 22 centimètres de large. Lors du passage d'une coupe à travers une rivière, il maintenait une trajectoire fluide malgré l'écoulement turbulent.
L’importance de cette recherche réside dans le fait qu’elle a surmonté la contradiction fondamentale entre la taille, le poids et la fonction des plates-formes d’opérations aériennes traditionnelles. Son poids léger
La conception légère de 556 grammes permet au robot de fonctionner dans des scénarios d'espace restreint, tels que les maisons et les usines, tandis que la capacité de préhension adaptative multimodale améliore ses possibilités d'application dans des environnements inconnus, selon l'université.
L'université a décrit cette conception bio-intégrée comme transformant des « yeux volants » en « mains volantes » et pouvant être appliquée aux secours en cas de catastrophe, à l'assistance à domicile et aux opérations sur le terrain.